In Projects, Underwater Robotics by ViCOROB
with No comment
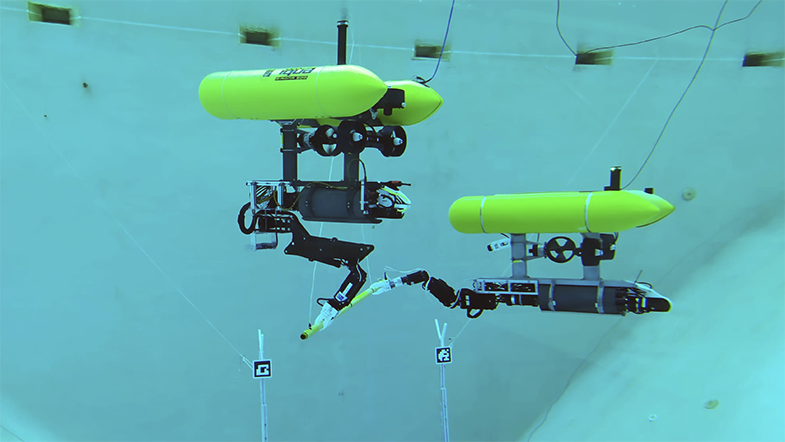
TWIN roBOTs for cooperative underwater intervention missions
TWINBOT is a project that aims to develop a new kind of I-AUVs able to work autonomously in a cooperative way. The underwater inspection, maintenance and repair operations are becoming the main focus of the research in underwater robotics. Due to the desire of…