What if we could carry out complex offshore inspection and maintenance tasks with a fleet of autonomous marine robots? We have just launched the TANDEM project (Heterogeneous team of Marine Robots for Multipurpose Inspection Maintenance (PID2023/149910OB-C31), funded by the Spanish Ministry of Science, Innovation and Universities with a budget of €220,750 and running from September 2024 to December 2027.
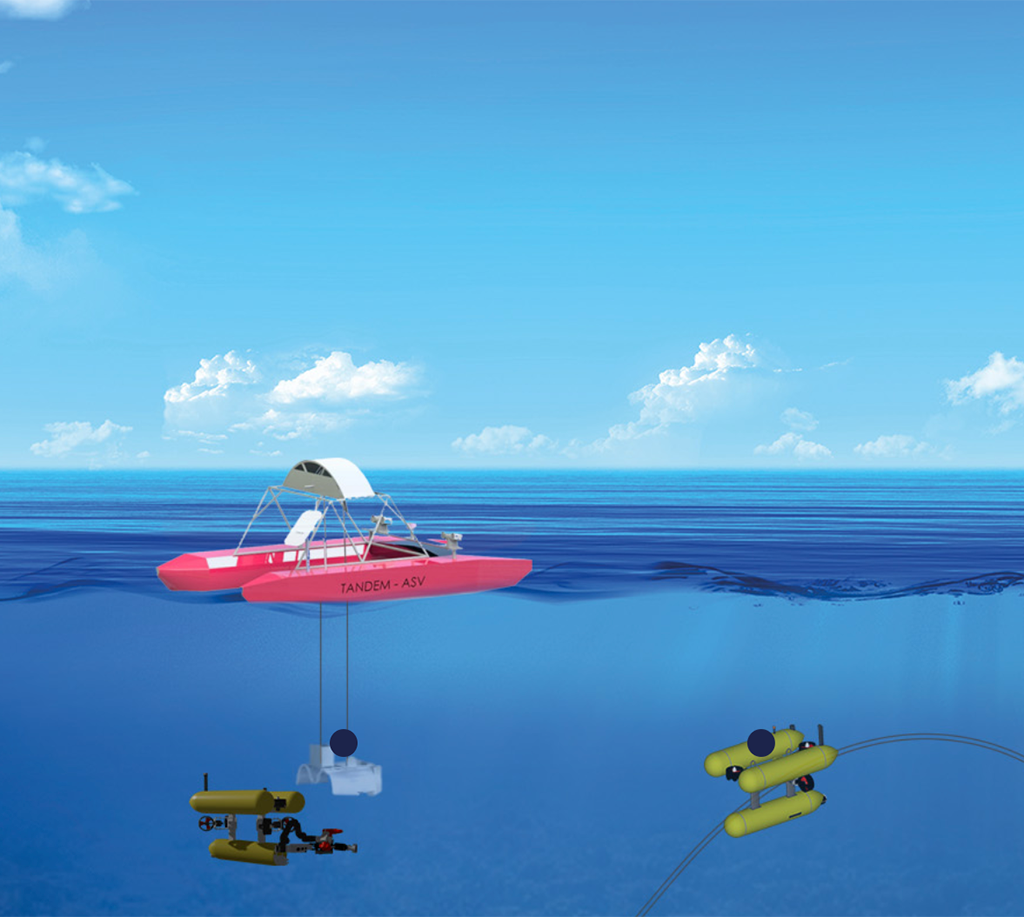
The idea behind TANDEM is to combine different types of marine robots to operate together in offshore environments such as wind farms and fish farms. The system will integrate an Autonomous Surface Vehicle (ASV) with a bi-manual Intervention Autonomous Underwater Vehicle (I-AUV), allowing coordinated operations with a level of autonomy not previously demonstrated in these scenarios.
Our planned work focuses on several technological and scientific challenges. We will develop multimodal interfaces for remote operation, advanced control methods, and strategies for multi-vehicle coordination. We will also explore multimodal communication in underwater environments, map complex marine structures, and implement systems for defect detection and operational monitoring.
At ViCOROB, we will coordinate TANDEM in collaboration with our long-term partners at the Universitat Jaume I (UJI) and the Universitat de les Illes Balears (UIB). Our collaboration with these institutions goes back to 2008, and together we have participated in six national and one European project in marine robotics. This shared experience will allow us to tackle the technical complexity of TANDEM efficiently.
During the initial stages, we anticipate one of the main challenges will be ensuring reliable coordination between the surface and underwater vehicles, given the difficulties of underwater communication and navigation. We plan to carry out extensive simulations and lab tests to optimise control strategies and communication protocols before deploying the robots in offshore conditions. Another important challenge will be developing bimanual manipulation capabilities for the I-AUV, enabling precise interventions on underwater structures.
By addressing these challenges, we aim to demonstrate a fully integrated heterogeneous robotic system capable of autonomous inspection, maintenance, and repair in complex offshore environments. TANDEM represents a step forward in marine robotics research, combining advanced technologies, multidisciplinary expertise, and long-term collaboration across institutions.



