Doctoral thesis “Coverage Path Planning for Autonomous Underwater Vehicles”
By Enric Galceran, PhD student of the Doctoral Program in Technology
Supervised by Dr. Marc Carreras Pérez
Abstract
At present, a mission to survey the ocean floor with an Autonomous Underwater Vehicle (AUV) is typically planned by selecting a list of waypoints that then the vehicle will automatically navigate through while keeping a safe distance from the bottom. Nonetheless, this approach has major drawbacks: (1) it does not allow the vehicle to safely operate amidst protrusions on the sea floor; (2) when traversing rugged terrain, the vehicle is forced to keep a conservative altitude, limiting applications requiring close proximity such as photomosaicing; (3) when inspecting 3D, protruding structures from the bottom the vehicle can only perceive them from an overhead viewpoint, resulting in poor data collected from these sites; (4) it does not account for the effect of the terrain on the vehicle’s position estimates.
To address these limitations, this thesis proposes new methods to find collision-free paths allowing an AUV to cover an area of the ocean floor with its sensors, which is known as coverage path planning.
First, we propose a coverage path planning method to plan 2D, safe-altitude surveys which provides a principled way to account for obstacles in AUV survey planning. Its main advantage is that it minimizes redundant coverage when the vehicle navigates at constant depth, leading to shorter paths.
Second, we provide a method to account for the uncertainty in the vehicle position estimates when planning 2D surveys. The method minimizes the uncertainty induced by the path and leads to better maps of the ocean floor as a result.
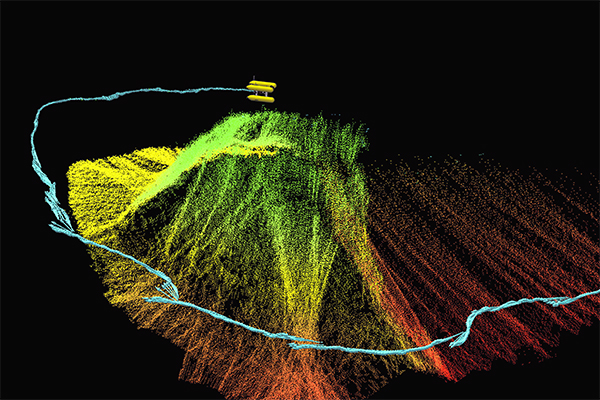
Third, we provide a coverage path planning method suitable for inspecting areas of the ocean floor including 3D structures. The resulting coverage paths enable applications requiring close proximity and allow viewpoints for full 3D sensing of the structure. Moreover, by contrast to most existing methods, we provide two techniques to adapt the planned path in realtime using sensor information acquired on-line during the mission, rather than only planning the path off-line and relying on the unrealistic assumption of an idealized path execution by the AUV. The proposed methods are validated in simulation and in experiments with a real-world AUV.
Tesi Doctoral: Coverage Path Planning for Autonomous Underwater Vehicles
Per Enric Galceran, estudiant del Programa de Doctorat en Tecnologia
Supervisat per Dr. Marc Carreras Pérez
Traducció del títol al català: Planificació de Camins de Cobertura per a Vehicles Submarins Autònoms
Resum
Actualment, una missió per a cartografiar el fons marí amb un vehicle submarí autònom és planificada típicament seleccionant una llista de punts a través dels quals el vehicle navegarà automàticament mentre es manté a una distància segura del fons. Tanmateix, aquesta metodologia presenta considerables inconvenients: (1) no permet al vehicle operar amb seguretat entre obstacles que sobresurten del fons; (2) en recórrer terreny escarpat, el vehicle és forçat a mantenir una altitud conservadora, impedint tasques que requereixen proximitat al fons, com ara la creació de fotomosaics; (3) en inspeccionar estructures 3D que sobresurten del fons, el vehicle pot només percebre-les des d’un punt de vista zenital, obtenint dades de baixa qualitat com a resultat; (4) no té en compte l’efecte del terreny sobre les estimacions de posició del vehicle.
Amb l’objectiu d’esmenar aquests inconvenients, aquesta tesi proposa nous mètodes per generar camins lliures de col·lisions per a vehicles submarins autònoms que permeten cobrir una àrea del fons de l’oceà usant els sensors del vehicle, tasca coneguda com a planificació de camins de cobertura.
Primer, proposem un mètode de planificació de camins de cobertura per a planificar missions en un espai 2D a una altitud segura, proporcionant una manera fonamentada de tenir en compte obstacles en la planificació de missions per a vehicles submarins autònoms. L’avantatge principal del mètode proposat és que minimitza la cobertura redundant sorgida quan el vehicle navega a profunditat constant,
obtenint camins més curts com a resultat.
Segon, presentem un mètode per tenir en compte la incertesa de les estimacions de posició del vehicle durant la planificació de missions 2D. Aquest mètode minimitza la incertesa induïda pel camí i genera mapes més acurats del fons oceànic com a resultat.
Tercer, presentem un mètode de planificació de camins de cobertura adequat per inspeccionar àrees del fons oceànic amb estructures 3D. Els camins de cobertura resultants permeten tasques que requereixen proximitat al fons i permeten una completa percepció 3D de les estructures d’interès. A més, a diferència de la majoria dels mètodes existents, proporcionem dues tècniques per adaptar els camins planificats en temps real utilitzant informació sensorial adquirida durant la missió, per contra de planificar només abans de l’execució de la missió i confiar en la poc realista assumpció d’una execució idealitzada del camí per part del vehicle. Els mètodes proposats han estat validats en simulació i en experiments amb un vehicle submarí autònom real.


