TWINBOT is a project that aims to develop a new kind of I-AUVs able to work autonomously in a cooperative way.
The underwater inspection, maintenance and repair operations are becoming the main focus of the research in underwater robotics. Due to the desire of using small, autonomous vehicles instead of heavy work-class remotely operated vehicles, these tasks need a new definition and approach, to overcome the limits of the robots, such and limited manipulation force/torque capabilities (small electric manipulators). One of the tasks in which these two limits are especially important is object transportation. Transporting a heavy or long object is particularly difficult with a single I-AUV.
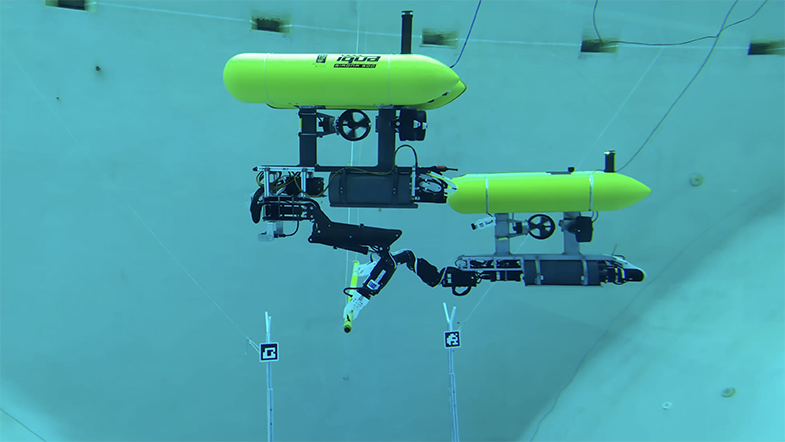
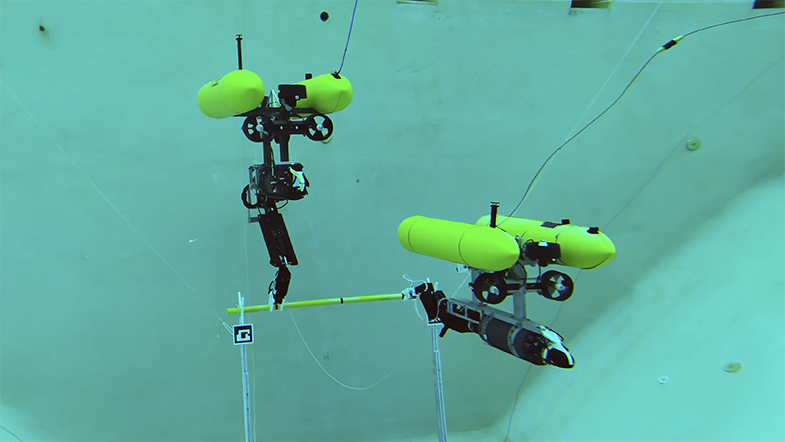
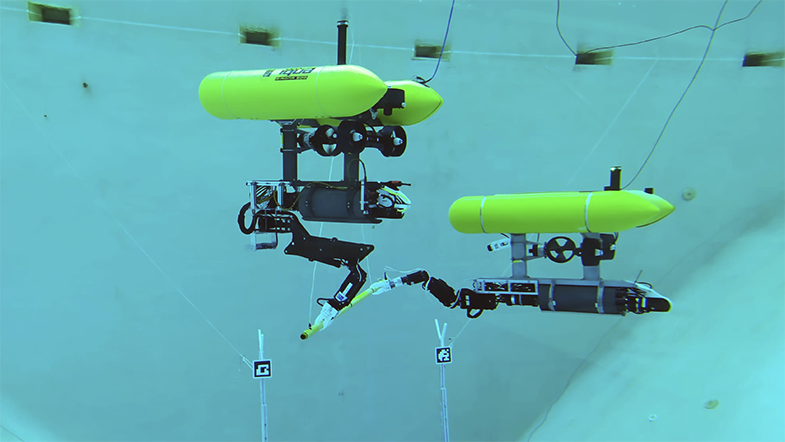
TWINBOT project aims to achieve a step forward in the underwater intervention state of the art by introducing multiple vehicle operations. Experiments are now taking place in the CIRS facilities, within Girona1000 subproject, using two Girona500 I-AUVs equipped with electric manipulators, one owned by the University of Girona (UdG) and the other owned by the University Jaume I (UJI), which is the partner in the project. The goal of the mission is to perform a fully autonomous sequence of pick, transport and place operations on a 2 meters long pipe.
The scientific and technological results of this project will permit achieving a unique twin I-AUV system to allow us to study promising research lines in a nearly unexplored research field in the underwater domain.