By Dina Nagui Youakim Isaac
Supervised by Dr. Pere Ridao
Abstract
A key challenge in autonomous mobile manipulation is the ability to determine in real-time how to safely execute complex tasks when placed in an unknown world. Motion Planning has been widely used in terrestrial and aerial robots to cope with such challenges, while it stayed unexplored for underwater intervention. In the last few years, Intervention Autonomous Underwater Vehicles (I-AUVs) became subject of broad interest in research, with only few real demonstrations mostly relying on variations of the task-priority redundancy control framework.
In response to those arising needs, this thesis focused on advancing the state of the art by investigating the use of Motion Planning to increase the autonomy of I-AUVs in the context of “Inspection, Maintenance, Repair” missions in unknown environments.
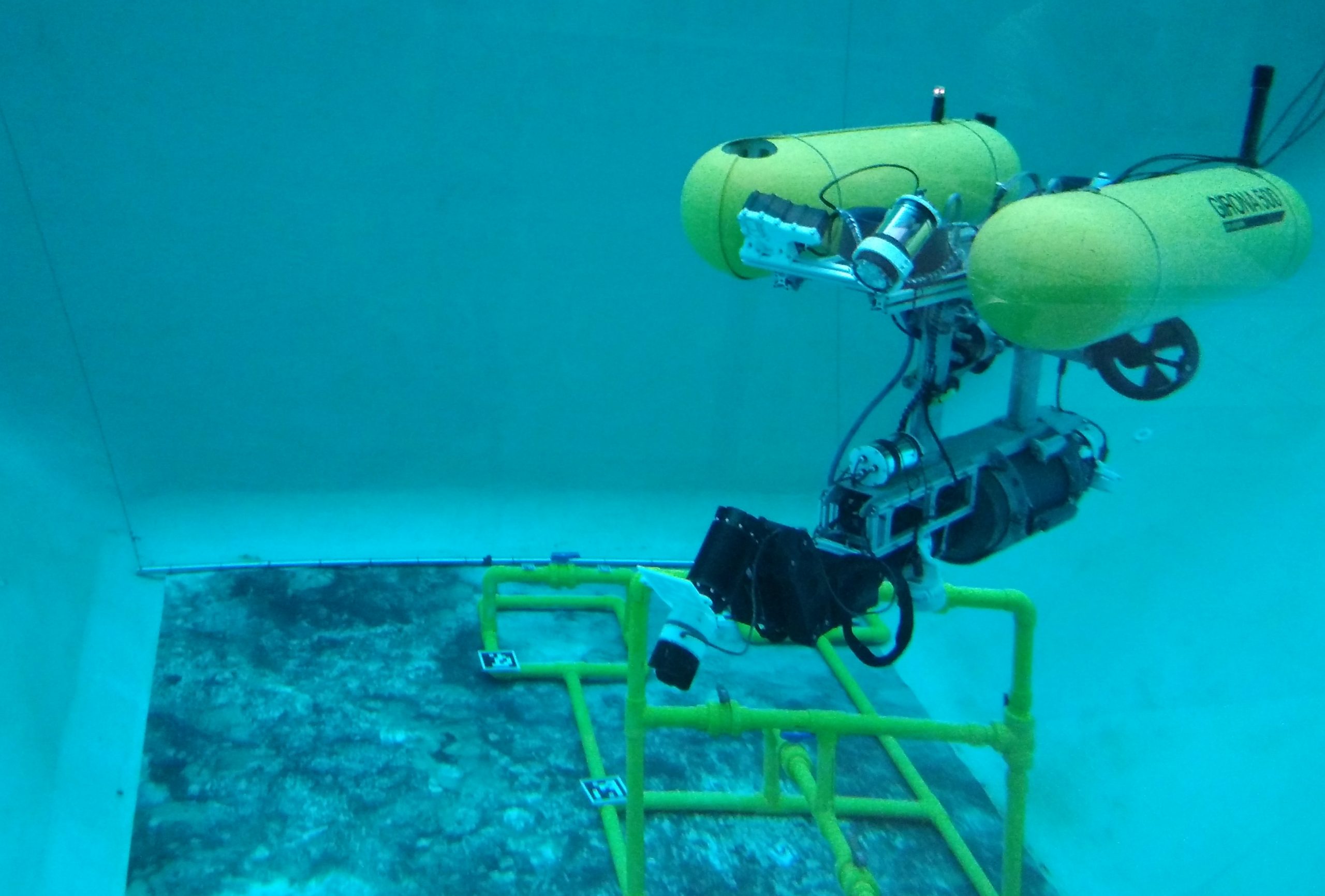
Through our work, we initially present a modeling and integration of our I-AUV using common terrestrial mobile manipulation framework MoveIt!, showing for the first time motion planning for an I-AUVs in the presence of virtual obstacles. Then, based on our observations of our previous demonstrations, and in order to base our choice of the motion planning technique on a solid scientific foundation, we performed a deep analysis of the state of the art motion planning techniques. We created benchmarks, and compared 17 motion planners in 5 different scenarios and came out with guidelines for choosing the best fitting method for given requirements. Later, we identified planner specifications for underwater intervention: 1) Real-Time response for a high Degree of Freedom (DoF) system, 2) Consistency, 3) Efficient trajectories in terms of traveled distance, safety, and system loose coupling utilization. As a consequence, we propose a new motion planning algorithm under the umbrella of search-based method, that exploits the loose coupling nature of an I- AUV while generating consistent, efficient, and safe trajectories in unknown environments.
Both simulation and experimental (in water tanks) results are presented for various stages of the work, showing the flow and validating the efficiency and potential of the developed algorithm. The proposed method, conveniently integrated within the robot system’s architecture, increases the reliability of the I-AUV performing intervention, both safely and robustly when operating in unknown terrains.
Resum
La capacitat de decidir en temps real com executar de manera segura uns tasca complexa en un entorn desconegut és un repte clau en la manipulació móvil autònoma. Per abordar-ho, s’utilitzen habitualment tècniques de Planificació de Moviment tant en robots terrestres com aeris, mentre la seva aplicació a l’àmbit submarí roman inexplorada. Durant els darrers anys, l’interès de la comunitat científica pels I-AUVs ha crescut significativament, havent fructificat les primeres demostracions experimentals basades en variacions del mètode de control de redundància utilitzant tasques amb prioritat. Aquesta tesi doctoral avança l’estat de l’art investigant l’ús dels mètodes de Planificació de Moviment per augmentar l’autonomia dels I-AUVs per aplicacions d’Inspecció, Manteniment i Reparació executades en entorns desconeguts. A través del nostre treball, presentem la modelització i integració del nostre I-AUV en MoveIt!, un entorn per a la programació d’aplicacions de manipulació móvil comunament utilitzat en robótica terrestre.
Amb l’objectiu de fonamentar científicament l’elecció del mètode de Planificació de Moviment apropiat al nostre problema, s’ha dut a terme un anàlisis comparatiu de l’estat de l’art. S’han definit 5 escenaris de manipulació representatius (benchmarks) i s’han comparat 17 planificadors diferents. L’anàlisis dels resultats ens ha permès establir les guies per a l’elecció de la tècnica més apropiada a les nostres necessitats. Posteriorment, s’han identificat les especificacions desitjades pels planificadors en aplicacions d’intervenció submarina: 1) Resposta a temps real d’un sistema amb un elevat nombre de graus de llibertat, 2) Consistència 3) Generació de trajectòries eficients en termes de distancia i seguretat, així com l’ús de sistemes dèbilment acoblats. A partir dels resultats de l’anàlisis, es proposa un nou algoritme de planificació de moviment, dintre de la familia dels mètodes de cerca, que explota l’acoblament débil entre el manipulador i el vehicle, generant, al mateix temps, trajectòries consistents, eficients i segures en entorns desconeguts. Al llarg de la recerca duta a terme s’han utilitzat resultats en simulació i experimentals (en tanc d’aigua), per a validar l’eficiència i el potencial de l’algoritme. El mètode proposat, convenientment integrat en el sistema de control, incrementa la fiabilitat del robot que desenvolupa la intervenció, millorant la seguretat i robustesa operant en un entorn desconegut.
Online video: https://bit.ly/2qMWc9d