Underwater maps are an important source of information for the scientific community, since mapping the seafloor is the starting point for underwater exploration. The advance of range scanning methodologies, both using acoustic and optical techniques, enables the mapping of the seabed to attain increasingly larger resolutions.
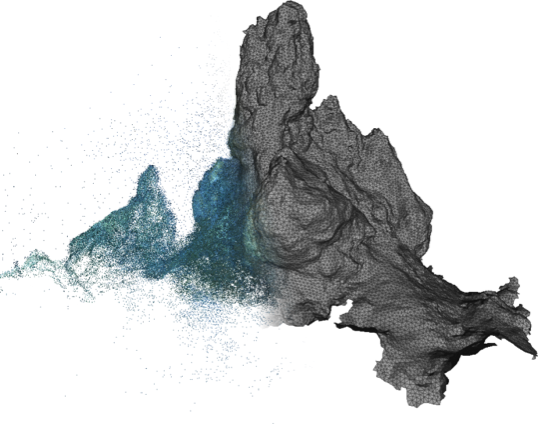
However, all these techniques sample the surface to reconstruct in the form of a point cloud. For the case of areas containing non-trivial 3D relief, achieving a continuous representation from this discrete sampling is a complex task.
Surface reconstruction methods try to tackle this problem by recovering a continuous surface representing the object in the form of a mesh of triangles, easing visualization and further processing. This thesis proposes four different strategies to tackle the problem of surface reconstruction from point sets.
We start by reviewing the state of the art on surface reconstruction methods. From this survey, we extract some conclusions regarding the flaws in current methods, especially when applied to point clouds coming from underwater imagery which often suffer from noise and outliers. On the one hand, the noise refers to the variability and precision of the measurements, while on the other hand outliers are completely wrong measurements. Taking these into account, in this thesis we devise a set of methods where common errors in the scanned measurements are taken into account by promoting four methods resilient to both noise and outliers. Moreover, our methods allow the recovery of bounded surfaces, that usually appear when exploring an underwater scenario. Additionally, and instead of restricting ourselves to our application area, we ensure that the presented algorithms do not require any kind of additional information to work so they can be used with any kind of point-based data regardless of whether they have been acquired using photogrammetry, laser or acoustic techniques.
The advantages and disadvantages of each method proposed are extensively discussed. Moreover, we validate the methods proposed through their application to datasets from various sources with a wide range of sampling conditions. Additionally, the results obtained by these algorithms are discussed and compared qualitatively and quantitatively with other state-of-the-art approaches.
_____________
Els mapes del fons del marí són una important font d’informació per la comunitat científica, donat que la cartografia del fons marí és el punt de partida per l’exploració dels oceans. Els avenços en les metodologies d’escaneig, mitjançant tècniques tant acústiques com òptiques, permet que la construcció de mapes del fons marí es realitzi cada cop a més altes resolucions.
Tot i això, totes aquestes tècniques mostregen la superfície de l’àrea d’interès en la forma d’un núvol de punts. En el cas de les àrees que presenten un gran relleu 3D, aconseguir una representació contínua a partir d’aquest mostreig discret és una tasca complexa.
Els mètodes de reconstrucció de superfícies són els encarregats de tractar aquest problema per tal d’obtenir una superfície continua que representi l’objecte en forma d’una malla de triangles, que facilitarà l’aplicació de tècniques de visualització i el processat posterior d’aquestes dades. Aquest treball contribueix a l’àrea de reconstrucció de superfícies amb quatre mètodes diferents.
La tesi comença per revisar l’estat de l’art dels mètodes de reconstrucció de superfícies. D’aquesta revisió, n’hem extret conclusions referents als defectes dels mètodes actuals, especialment quan aquests s’apliquen a núvols de punts creats a partir d’imatges subaquàtiques, ja que aquest tipus d’imatges presenten normalment soroll i outliers. Per una banda, el soroll es refereix a la variabilitat i la precisió de les mesures, mentre que per altra banda els outliers són mesures completament errònies. Tenint en compte aquests problemes, en aquesta tesi proposem un seguit de mètodes que tenen en compte els errors comuns en aquests mostrejos, i promovem la creació de quatre mètodes diferents resistents tant a soroll com a outliers. Tanmateix, els nostres mètodes permeten recuperar superfícies amb llindars, fenomen que apareix normalment quan s’explora un escenari submarí. A més, lluny de restringir la nostra àrea d’aplicació, assegurem que els algoritmes presentats no requereixen de cap altre tipus d’informació addicional, com ara les normals que necessiten molts dels mètodes de l’estat de l’art. Així, els mètodes proposats en aquesta tesi poden ser utilitzats amb qualsevol classe de dades basades en punts, independentment de si els punts s’han adquirit mitjanant escaneig làser, fotogrametria o tècniques acústiques.
En la tesi es discuteixen àmpliament els avantatges i desavantatges de cadascun dels mètodes proposats. Tanmateix, els algorismes han estat validats mitjançant la seva aplicació a conjunts de dades provinents de fonts vàries i amb una àmplia diversitat en les condicions de mostreig. A més, els resultats obtinguts pels nostres algoritmes han estat avaluats i comparats tant qualitativament com quantitativament contra altres mètodes de l’estat de l’art.



