During the last week researchers from VICOROB have collaborated with a team from Jacobs University within the EUMarineRobots (EUMR) project framework. The main objective of the EUMR project is to open up key national and regional marine robotics research infrastructures (RIs) to all European researchers, from both academia and industry, ensuring their optimal use and joint development to establish a world-class marine robotics integrated infrastructure.
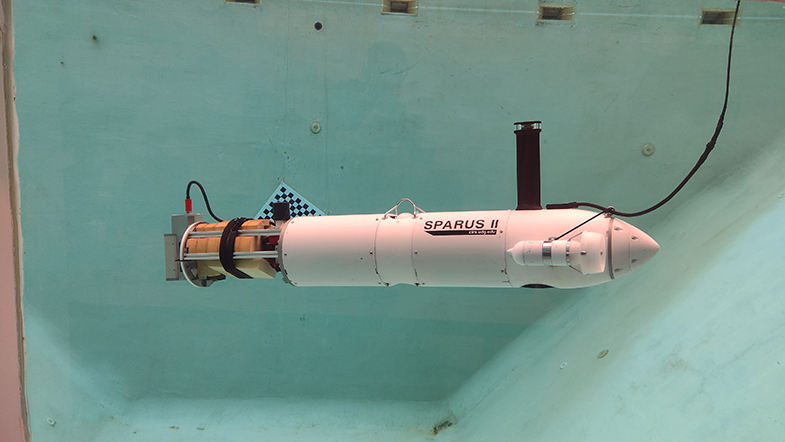
Jacobs researchers are working on a fault detection system for Sparus II AUV as well as different ways to run remote experiments. Since starting in November we have been designing and testing the algorithms to simulate thruster failures by applying a percentage of the force requested to specific thrusters and designing the experiments where they will detect the faults. Initial testing of all code has been done remotely in the water tank of CIRS while also testing different SSH/VPN solutions to execute code remotely.
On Friday 5th of February the VICOROB team moved to Sant Feliu de Guixols’ harbor to run extensive tests, with and without different failures and at different velocities and trajectories, to collect enough data for Jacob’s researchers to develop the fault detection algorithm.




