As part of the COOPERAMOS project, led by the University of Girona, research is being conducted to push the boundaries of underwater robotics. The COOPERAMOS project focuses on developing collaborative technologies for autonomous underwater vehicles (AUVs) to perform complex tasks, such as assembling structures beneath the sea.
In one of its experimental efforts, the University of Girona is exploring how these advanced robotic systems can autonomously assemble structures underwater—tasks that have traditionally depended on human-operated systems.
Underwater Assembly: From Vision to Reality
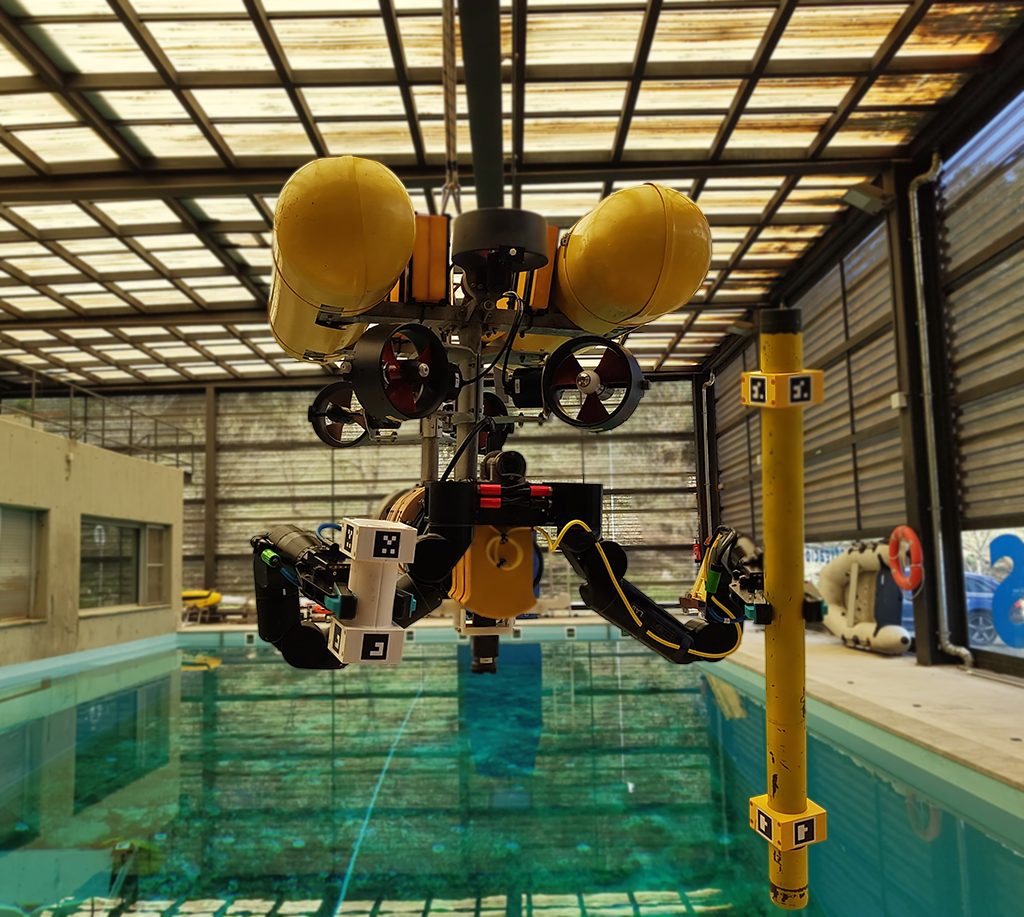
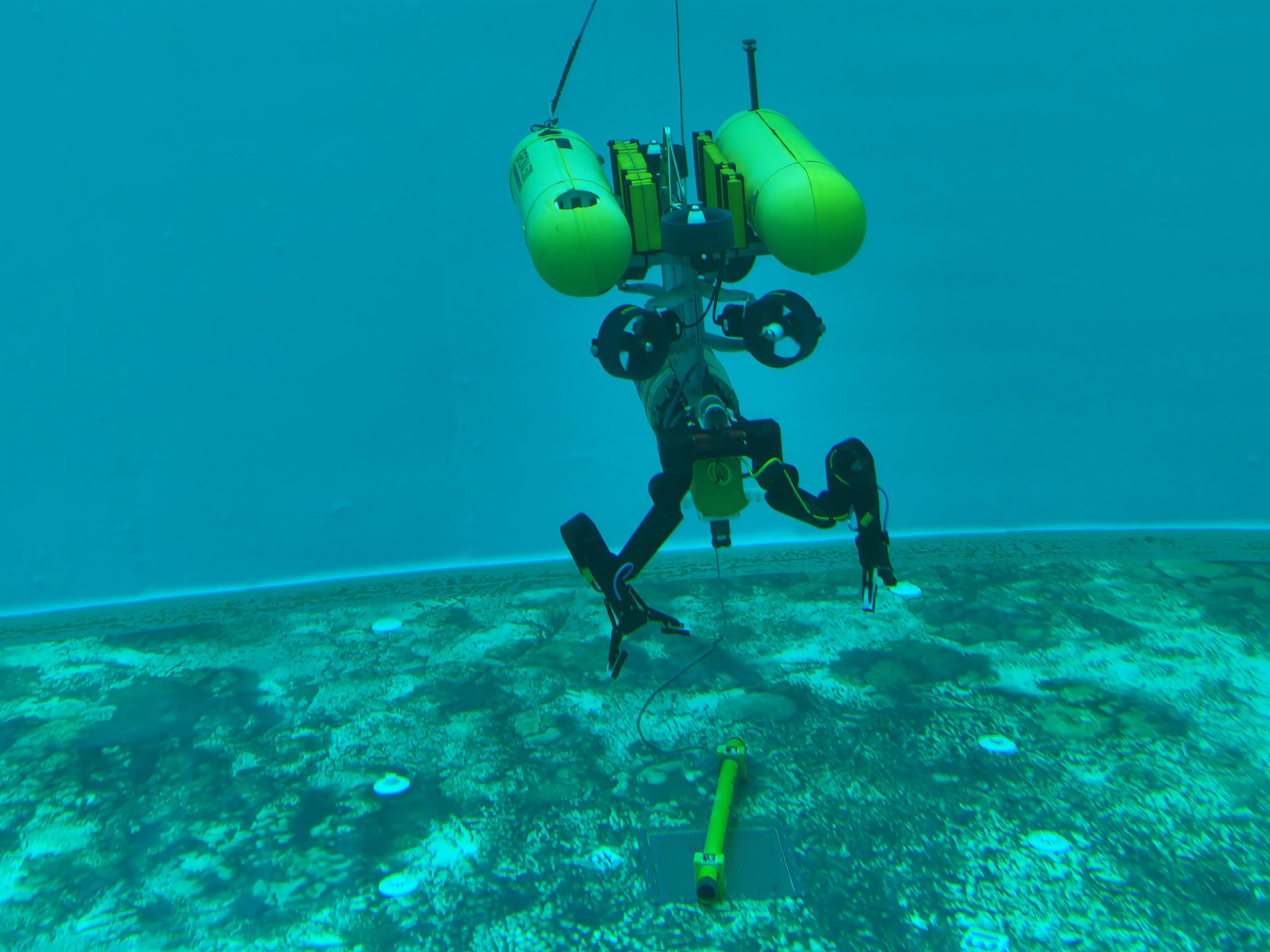
The current focus of the project is on assembling a structure made of multiple pipes, simulating tasks such as constructing underwater frameworks or infrastructure. This is being tested inside the CIRS water tank.
The Girona500 Intervention-AUV (I-AUV), equipped with two robotic arms is taking the lead. Using its arms, the vehicle can pick up and connect individual pipe sections, carefully aligning and inserting them to build larger assemblies.
A Glimpse into Cooperative Underwater Robotics
As the assembly grows longer and heavier, a key challenge arises: the structure becomes too large for a single robot to handle efficiently. At that point, a second robot will join the operation. Working together, the two robots will lift and stabilize the growing structure, allowing the dual-arm robot to continue the assembly process with precision and safety.
This approach will demonstrate how teams of underwater robots can dynamically adapt to the task, seamlessly shifting from solo operations to collaborative manipulation when needed.
Towards Safer, Smarter, and More Autonomous Ocean Missions
These experiments are paving the way for a future where autonomous robots can perform complex intervention tasks underwater, such as assembling parts of offshore infrastructure, maintaining underwater observatories, or supporting renewable energy installations.



